
Los Proyectos en gran escala por una sola vez han existido desde tiempos antiguos; este hecho lo atestigua la construcción de las pirámides de Egipto y los acueductos de Roma, pero sólo desde hace poco se han analizado por parte de los investigadores operacionales los problemas gerenciales asociados con dichos proyectos.
El problema de la administración de proyectos, surgió con el proyecto de armamentos del Polaris, empezando en 1.958, con tantos componentes y subcomponentes juntos producidos por diversos fabricantes, se necesitaba una nueva herramienta para programar y controlar el proyecto. El PERT ( evaluación de programa y técnica de revisión.) fue desarrollado por científicos de la oficina Naval de Proyectos Especiales . Booz Allen y Hamilton y la División de Sistemas de Armamentos de la Corporación Lockheed Aircraft. La técnica demostró tanta utilidad que ha ganado amplia aceptación tanto en el gobierno como en el sector privado.
Casi al mismo tiempo, la Compañía DuPont, junto con la división UNIVAC de la Remington Rand, desarrollo el método de la ruta crítica CPM, para controlar el mantenimiento de proyectos de plantas químicas de DuPont. El CPM es idéntico al PERT en concepto y metodología. La diferencia principal entre ellos es simplemente el método por medio del cual se realizan estimados de tiempo para las actividades del proyecto. Con CPM, los tiempos de las actividades son deterministicos. Con PERT, los tiempos de las actividades son probabilísticos o estocásticos.
El PERT/CPM fue diseñado para proporcionar diversos elementos útiles de información para los administradores del proyecto. Primero el PERT/CPM expone la "ruta crítica" de un proyecto. Estas son las actividades que limitan la duración del proyecto. En otras palabras, para lograr que el proyecto se realice pronto, las actividades de la ruta crítica deben realizarse pronto. Por otra parte, si una actividad de la ruta crítica se retarda, el proyecto como un todo se retarda en la misma cantidad. Las actividades que no están en la ruta crítica tienen una cierta cantidad de holgura; esto es, pueden empezarse más tarde y permitir que el proyecto como un todo se mantenga en programa. El PERT/CPM identifica éstas actividades y la cantidad de tiempo disponible para retardos.
El PERT/CPM también considera los recursos necesarios para completar las actividades. En muchos proyectos, las limitaciones en mano de obra y equipos hacen que la programación sea difícil. El PERT/CPM identifica los instantes del proyecto en que estas restricciones causarán problemas y de acuerdo a la flexibilidad permitida por los tiempos de holgura de las actividades no críticas, permite que el gerente manipule ciertas actividades, para aliviar estos problemas.
Finalmente, el PERT/CPM proporciona una herramienta para controlar y monitorear el progreso del proyecto. Cada actividad tiene su propio papel en éste y su importancia en la terminación del proyecto, se manifiesta inmediatamente para el director del mismo. Las actividades de la ruta crítica, permiten por consiguiente, recibir la mayor parte de la atención, debido a que la terminación del proyecto depende fuertemente de ellas. Las actividades no críticas se manipularán y remplazarán en respuesta a la disponibilidad de recursos.
El PERT/CPM es una herramienta muy importante en "la administración por excepción" del gerente moderno, puesto que le permite dirigir el proyecto, concentrándose en aquellas actividades no críticas que afectan su terminación, (i.e., todas las actividades de la ruta crítica.).
DIFERENCIAS ENTRE PERT Y CPM
La principal diferencia entre PERT y CPM es la manera en que se realizan los estimados de tiempo. El PERT supone que el tiempo para realizar cada una de las actividades es una variable aleatoria descrita por una distribución de probabilidad. El CPM por otra parte, infiere que los tiempos de las actividades se conocen en forma determinística y se pueden variar cambiando el nivel de recursos utilizados.
La distribución de tiempo que supone el PERT para una actividad es una distribución beta. La distribución para cualquier actividad se define por tres estimados: 1) El estimado de tiempo más probable, m, 2) El estimado de tiempo más optimista, a; y 3) el estimado de tiempo más pesimista b. La forma de la distribución se muestra en la figura siguiente . El tiempo más probable es el tiempo requerido para completar la actividad bajo condiciones normales. Los tiempos optimistas y pesimistas proporcionan una medida de la incertidumbre inherente en la actividad, incluyendo desperfectos en el equipo, disponibilidad de mano de obra, retardo en los materiales y otros factores.

Con la distribución definida, la media (esperada) y la desviación estándar, respectivamente, del tiempo de la actividad para la actividad Z puede calcularse por medio de las fórmulas de aproximación.
Te (Z) = a + 4m + b
6
o(Z) = b - a
6
El tiempo esperado de finalización de un proyecto es la suma de todos los tiempos esperados de las actividades sobre la ruta crítica. De modo similar, suponiendo que las distribuciones de los tiempos de las actividades son independientes (realísticamente, una suposición fuertemente cuestionable), la varianza del proyecto es la suma de las varianzas de las actividades en la ruta crítica. Estas propiedades se demostrarán posteriormente.
En CPM solamente se requiere un estimado de tiempo. Todos los cálculos se hacen con la suposición de que los tiempos de actividad se conocen. A medida que el proyecto avanza, estos estimados se utilizan para controlar y monitorear el progreso. Si ocurre algún retardo en el proyecto, se hacen esfuerzos por lograr que el proyecto quede de nuevo en programa cambiando la asignación de recursos.
MODELAJE DE SISTEMAS PERT/CPM
Para aplicar el PERT/CPM a un proyecto, se requiere comprender completamente la estructura y requisitos del mismo. El esfuerzo que se gaste para identificar la estructura del proyecto es de gran valor para la comprensión de este. En particular, se deben contestar cuatro preguntas para empezar el procedimiento de modelaje:
- Cuáles son las actividades que el proyecto requiere?
- Cuáles son los requisitos de secuenciación o restricciones de estas actividades?
- Qué actividades pueden realizarse simultáneamente?
- Cuáles son los tiempos estimados para cada actividad?
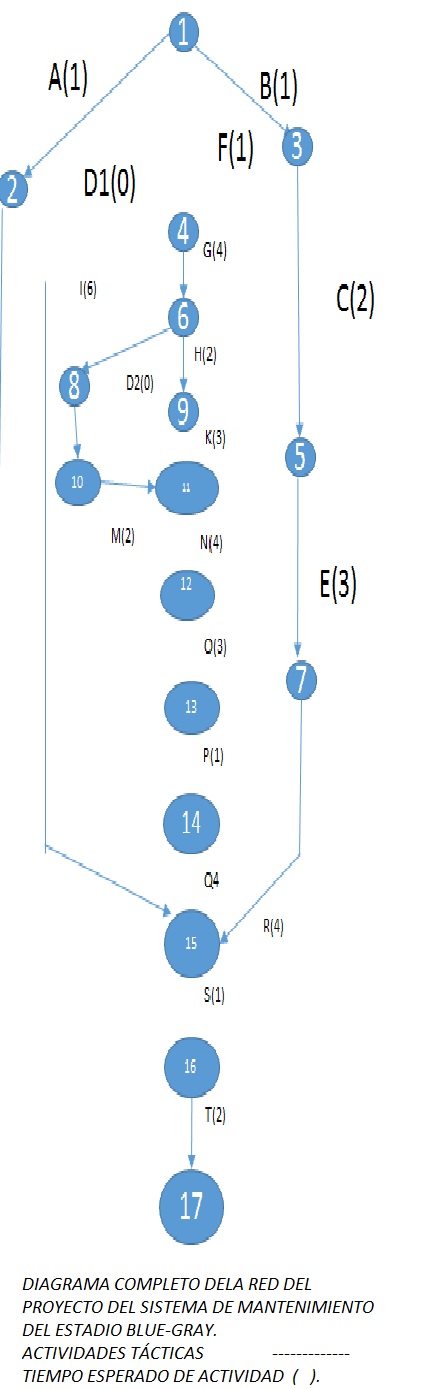
El primer paso para construir la red PERT/CPM consiste en hacer una lista de cada una de las actividades y de las actividades que inmediatamente las deben preceder. La tabla lista las actividades para un proyecto de mantenimiento en el sistema de alumbrado del estadio Blue - Gray.

Cada una de las actividades se representarán por una flecha. Las flechas unirán los nodos, representados por pequeños circulos. Los nodos representarán el estado del proyecto. Por ejemplo, en general, un nodo típico tiene la apariencia del nodo i, a su vez representa el fin de las actividades A, B y C. junto con el comienzo de las actividades D y E.
Así, en la lista de actividades, se genera un diagrama de la red conectando flechas y nodos que representan la estructura del proyecto. En nuestro ejemplo del proyecto de mantenimiento, la actividad A debe completarse antes de que la actividad D empiece, La actividad B debe completarse antes de que F empiece y así sucesivamente. Siguiendo este procedimiento es fácil llegar a la red parcial:

La actividad G no puede comenzar hasta que A y F se terminen. Parece que no hay manera de representar esta relación, pues A y F no pueden unirse en un nodo en el cual empiece G, las redes separadas aparecerían como las siguientes, para remediar este problema, se utiliza una actividad ficticia. La actividad ficticia se representa por una flecha punteada y no consume ni tiempo ni recursos. Sin embargo, produce el efecto de que A y F finalicen antes que empiece la actividad G.

Una red parcialmente construída incluyendo la actividad G, note que se han numerado los nodos para su identificación. Hay una convención en esta - que el número en la punta de una flecha es mayor que el número en el origen . Esto permite que las actividades se identifiquen por un par ordenado de números ( número de nodo del origen y número de nodo de la terminación). Este programa de identificación es muy útil para automatizar éstas redes en el computador y para desarrollar una formulación de programación matemática para estos problemas, los números actividad - nodo y los tiempos esperados de la actividad se muestran en la tabla.

Una vez que se ha desarrollado la red completa, deseamos encontrar la ruta crítica del proyecto. Esta es la ruta que limita el tiempo de terminación del mismo. Para hacer esto empezamos con el nodo 1, asignando un tiempo arbitrario para el inicio más temprano del proyecto, digamos cero. Puesto que el nodo 1 representa el punto de partida para las actividades A y B, a ellas también se les asigna cero, como el tiempo más temprano de iniciación (ES) y esto se denota por ES(A), ES(B) = 0.
El tiempo más temprano es que una actividad puede finalizar, el tiempo más temprano de finalización (EF), es precisamente el tiempo más temprano de finalización más el tiempo esperado de la actividad (el tiempo esperado de la actividad o el valor determinístico dado por el CPM o el medio de la distribución beta estimado para el PERT);
EF(A) = ES(A) + Te(A).
Te es la duración esperada de una actividad.

EF(A) = 0 + 1 = 1
EF(B) = 0 + 1 = 1
Puesto que la actividad C depende solamente de la terminación de la actividad B, esta puede empezar tan pronto como se termine la actividad B. Por más temprana (EF) de la actividad B, o
ES(C) = EF (B) = 1
EF(C) = ES (C) + Te (C)
= 1+2
= 3
Similarmente, para la actividad F,
ES(F) = EF(B) = 1
EF(F) = ES(F) + Te (F)
= 1 + 1
= 2
Ahora deseamos calcular los tiempos más tempranos de iniciación para la actividad G. Sin embargo, esta vez hay dos flechas que terminan en el nodo 4, que señala el comienzo de la actividad G. La primera variable ficticia (D1), como usted recuerda, tiene una duración de cero [ Te (D1) = 0]. Por consiguiente,
ES(D1) = EF(A) = 1
EF(D1) = ES(D1) + Te(D1)= 1 + 0
= 1
Pero tal como lo calculamos anteriormente EF(E) = 2
La actividad G no puede empezar hasta que ambas actividades D1 y F se terminen. Por tanto
ES(G) = máx [EF(D1), EF(F) ].
= máx (1,2)
= 2
EF(G) = ES(G) + Te (G)
= 2 + 4
= 6
En general, cuando dos o más actividades concluyan en un nodo, el tiempo más temprano de iniciación para las actividades que emanan de dicho nodo es el máximo de los tiempos más tempranos de finalización para las actividades que concluyen allí, la tabla de los tiempos más tempranos de iniciación y finalización para todas las actividades del proyecto.
Código de actividad
|
Te
|
ES
|
EF
|
LS
|
LF
|
TS
|
FS
|
A
|
1
|
0
|
1
|
1
|
2
|
1
|
0
|
B
|
1
|
0
|
1
|
0
|
1
|
0
|
0
|
C
|
2
|
1
|
3
|
20
|
22
|
19
|
0
|
D
|
14
|
1
|
15
|
15
|
29
|
14
|
14
|
E
|
3
|
3
|
6
|
22
|
25
|
19
|
0
|
F
|
1
|
1
|
2
|
1
|
2
|
0
|
0
|
Ficticia
|
0
|
1
|
1
|
2
|
2
|
1
|
1
|
G
|
4
|
2
|
6
|
2
|
6
|
0
|
0
|
H
|
2
|
6
|
8
|
12
|
14
|
6
|
0
|
I
|
6
|
2
|
8
|
23
|
29
|
21
|
21
|
J
|
7
|
6
|
13
|
6
|
13
|
0
|
0
|
Ficticia
|
0
|
13
|
13
|
14
|
14
|
1
|
0
|
K
|
3
|
13
|
16
|
14
|
17
|
1
|
1
|
L
|
2
|
13
|
15
|
13
|
15
|
0
|
0
|
M
|
2
|
15
|
17
|
15
|
17
|
0
|
0
|
N
|
4
|
17
|
21
|
17
|
21
|
0
|
0
|
O
|
3
|
21
|
24
|
21
|
24
|
0
|
0
|
P
|
1
|
24
|
25
|
24
|
25
|
0
|
0
|
Q
|
4
|
25
|
29
|
25
|
29
|
0
|
0
|
R
|
4
|
6
|
10
|
25
|
29
|
19
|
19
|
S
|
1
|
29
|
30
|
29
|
30
|
0
|
0
|
T
|
2
|
30
|
32
|
30
|
32
|
0
|
0
|
Resumen de los datos para el proyecto de mantenimiento del sistema de alumbrado del Estadio Blue-Gray.
Ya sabemos que el proyecto se debe completar en 32 días después de iniciado. Pero no hemos identificado la ruta crítica o cualquier holgura que pueda existir en la programación del proyecto. Para hacer esto, elegimos un tiempo arbitrario para completar el proyecto (elijamos 32) y recorremos la red hacia atrás haciendo la pregunta: Qué es lo más tarde que ésta actividad puede terminarse sin retardar la finalización en todo el proyecto?
Obviamente, la actividad T debe completarse el día 32; por tanto, la finalización más tardía de la actividad T[LF(F)] es 32. A continuación calculamos el tiempo más tardío en que se puede iniciar la actividad T sin causar demoras en el proyecto. El tiempo más tardío de iniciación para la actividad T[LS(T)] es precisamente el tiempo más tardío de finalización menos el tiempo de la actividad, o
LS(T) = LF(T) - Te(T)
= 32 - 2
= 30
La actividad S debe finalizar antes de iniciar la actividad T. Por consiguiente, lo más tarde que puede terminarse S es 30, o lo más tarde que T puede iniciarse es.
LF(S) = LS(T)
= 30
Lo más tarde que la actividad S puede empezarse es.
LS(S) = LF(S) - Te (S)
= 30 - 1
= 29
Este proceso simple continuará hasta que lleguemos a un nodo con dos o más flechas que se originen en él, por ejemplo el nodo 6 , actividades H y J empiezan en el nodo 6, mientras que G finaliza allí. La iniciación más tardía de H es 12, de J es 6. Así la actividad G debe finalizarse a más tardar el día 6 o la actividad J se retardará haciendo que el proyecto total se retrace . Para el nodo 11.
LF(G) = min[LS(H), LS(J)]
= min (6,12).
= 6
En general para el nodo i,
ES(X) = ES(Y) = ES(Z) = max [EF(A), EF(B), EF(C)]
EF(X) = ES(X) + Te(X)
LF(A) = LF(C) = min [ LS(X), LS(Y), LS(Z)
LS(A) = LF(A) - Te (A).
Los tiempos de iniciación y finalización más tardíos para todas las actividades.

Ruta Crítica y Holgura.
Habiendo calculado ES, EF, LS, y LF para todas las actividades estamos en posición de identificar la holgura total(TS) y la holgura libre (FS), para cada una de las actividades, así también como la ruta crítica. La holgura total (TS) para cualquier actividad es la máxima cantidad de tiempo que la actividad puede retardarse sin afectar el tiempo de terminación del proyecto. Recordemos que LS se define como el tiempo más tardío de iniciación de una actividad sin retrasar la terminación del proyecto. Restando ES (el tiempo más temprano posible de iniciación) de LS obtenemos el retardo total permitido para cada actividad. Denotando la holgura total de cualquier actividad Z por TS:
TS(Z) = LS(Z) - ES(Z)
La ruta crítica de la red, siendo la ruta más larga de la red, debe tener la holgura total más pequeña de todas las actividades. Esta holgura mínima total también será igual a todas las actividades de la ruta crítica. En nuestro ejemplo de proyecto de mantenimiento, la ruta crítica comprende las actividades B,F,G,J,L,M,N,O,P,Q,S Y T ; esto también puede determinarse, observando aquellas actividades que tienen la mínima holgura total, que es igual a cero. (Aunque no sucedió aquí, es posible que una actividad ficticia esté en la ruta crítica).
La holgura es un concepto global que se refiere al tiempo que una actividad dada puede retardarse antes de que el proyecto como un todo exceda el calendario de finalización.
Otra noción útil para analizar un proyecto se denomina holgura libre (FS). Esta es la máxima cantidad de tiempo que cualquier actividad se puede retardar sin demorar la iniciación de la actividad siguiente. La holgura libre es un concepto local que le brinda al director del proyecto flexibilidad en la programación de una actividad dada que tenga holgura libre, sin perturbar la programación de cualquier otra actividad en el proyecto. Si el director retarda una actividad sin holgura libre tendrá que retardar otras actividades subsiguientes a dicha actividad. La holgura libre se calcula por:
EF (actividad dada) - ES (actividad sucesiva).
La holgura libre sólo ocurre en actividades no críticas y no excederá la holgura total. La holgura libre para cada una de las actividades se mostró en la tabla anterior, se mostró en anteriores figuras, es la red completa de nuestro proyecto de mantenimiento que muestra los tiempos de iniciación y finalización de resultantes, holgura libre y holgura total para cada actividad, así como también la ruta crítica.
CONCEPTOS PROBABILÍSTICOS CON PERT.
Ahora que hemos encontrado la ruta crítica para el proyecto ejemplo, supongamos que hemos estado trabajando con un sistema PERT. Los estimados de tiempo que hemos estado utilizando, deben provenir de estimados de tres parámetros (descritos anteriormente) y en la tabla siguiente:
CONCEPTOS PROBABILÍSTICOS CON PERT.
Ahora que hemos encontrado la ruta crítica para el proyecto ejemplo, supongamos que hemos estado trabajando con un sistema PERT. Los estimados de tiempo que hemos estado utilizando, deben provenir de estimados de tres parámetros (descritos anteriormente) y en la tabla siguiente:
Código de actividad
|
a
|
m
|
b
|
Te
|
o
|
A
|
0
|
1
|
2
|
1
|
0.33
|
B
|
1
|
1
|
1
|
1
|
0.00
|
C
|
0
|
2
|
4
|
2
|
0.67
|
D
|
9
|
12
|
27
|
14
|
3.00
|
E
|
2
|
3
|
4
|
3
|
0.33
|
F
|
1
|
1
|
1
|
1
|
0.00
|
G
|
2
|
3
|
10
|
4
|
1.33
|
H
|
1
|
1
|
7
|
2
|
1.00
|
I
|
2
|
5
|
14
|
6
|
2.00
|
J
|
4
|
5
|
14
|
8
|
1.67
|
K
|
2
|
3
|
4
|
3
|
0.33
|
L
|
1
|
1
|
7
|
2
|
1.00
|
M
|
1
|
2
|
3
|
2
|
0.33
|
N
|
2
|
4
|
6
|
4
|
0.67
|
O
|
1
|
3
|
5
|
3
|
0.67
|
P
|
1
|
1
|
1
|
1
|
0.00
|
Q
|
2
|
3
|
10
|
4
|
1.33
|
R
|
1
|
4
|
7
|
4
|
1.00
|
S
|
1
|
1
|
1
|
1
|
0.00
|
T
|
2
|
2
|
2
|
2
|
0.00
|
Estimados de tiempo PERT para el proyecto de mantenimiento luminoso en el Estadio Blue - Gray.
El tiempo esperado para completar el proyecto (Te) es exactamente el mismo que ya habíamos calculado. Sin embargo, también tenemos que estimar la varianza de terminación del proyecto o2p, que es la suma de las varianzas de las actividades en la ruta crítica sumando estas distribuciones de las actividades la distribución del proyecto se aproxima a una distribución normal basados en el teorema del límite central. El director del proyecto, puede entonces hacer declaraciones probabilísticas sobre el tiempo de terminación del proyecto. Como ilustración, en nuestro ejemplo el tiempo total del proyecto(Tp) se supone así que tiene una distribución normal con tiempo medio Tep igual a 32 y desviación estándar op igual a 2.89, ver tabla. Supongamos que el director del proyecto pregunta ¿ Cuál es la probabilidad de que el proyecto se termine en 35 días o menos de esta cifra?. El calcularía p( T < 35). Estandarizando Tp a una estadística Z y usando la tabla normal estándar.
P (Tp<35 ) = P (Z < (35 - 32)/2.89) => P(Z < 1.038 = 0.85
Así hay una posibilidad del 85% de que el proyecto finalice en 35 días o menos.
Cálculo de la desviación estándar del proyecto de sistema de mantenimiento del estadio blue-gray.
Código de actividad
|
o
|
o
|
|
B
|
0.00
|
0.00
|
|
F
|
0.00
|
0.00
|
|
G
|
1.33
|
1.78
|
|
J
|
1.67
|
2.78
|
|
L
|
1.00
|
1.00
|
|
M
|
0.33
|
0.11
|
|
N
|
0.67
|
0.44
|
|
O
|
0.67
|
0.44
|
|
P
|
0.00
|
0.00
|
|
Q
|
1.33
|
1.78
|
|
S
|
0.00
|
0.00
|
Por terminación del proyecto.
|
T
|
0.00
|
0.00
|
O2 = 8.33
La suposición de que o2p es la suma de la varianza de las actividades de la ruta crítica es correcta, estrictamente hablando, solamente si las actividades son independientes. Si no son independientes, las varianzas entre las actividades se deben determinar para obtener o2p. Este es el proceso complejo y fuera del alcance de este texto. Además, desde un punto de vista práctico, esto no es factible.
RECURSOS LIMITADOS Y COLISIÓN
Recursos limitados.
Hasta ahora no hemos discutido todavía como definir en realidad la programación de un proyecto completo, Hemos identificado el programa que deben tener las actividades de la ruta crítica, pero no el de las actividades no críticas.
Analicemos un proyecto diferente como el de la figura siguiente, como puede verificarse fácilmente, se espera completar el proyecto en 9 semanas. Para determinar la mano de obra que se requiere en cada semana, es útil graficar el proyecto en un gráfico como el de la figura, posteriormente la totalización de los hombres que se requieren en cada período se hace fácilmente.
Si el director del proyecto tiene mano de obra ilimitada, podría utilizar un programa definido por el tiempo de iniciación más temprano de cada actividad. Esto se traduciría en un perfil de mano de obra como el que se da en la figura, Sin embargo muy pocas compañías están en una posición tan afortunada; también, es muy indeseable desde un punto de vista gerencial tener grandes fluctuaciones en los requisitos de mano de obra de cualquier proyecto. Por consiguiente, el problema es nivelar la demanda de mano de obra durante la duración de este proyecto. Por ejemplo, Qué sucedería si la compañía tuviera solamente 18 hombres disponibles para el proyecto? ¿ Podría finalizar el proyecto sin prolongar el programa?.
Muchos programas heurísticos han sido desarrollados para el problema de balance de recursos en redes PERT/CPM. En el proyecto que se muestra a continuación, la atención principal se le debe brindar a aquellas actividades que tienen la mayor holgura, retardando estas tanto como sea posible. Por ejemplo, retardando la actividad C hasta el período 3 se permite que las actividades A y B procedan simultáneamente. Posteriormente podríamos mover la actividad I a los períodos 8 y 9 y la D al período 5. Esto abre los períodos 6 y 7 para la actividad H.


Ruta crítica = Tiempo normal (A - E - G) = 44 ($6.400)
Tiempo Colisionada ( A- E - G) = 28 ($10.000)
Diagrama de la red del proyecto con colisión permisible.
Tiempo Colisionada ( A- E - G) = 28 ($10.000)
Diagrama de la red del proyecto con colisión permisible.
Se puede notar que en este problema tan pequeño, los recursos requeridos en cada período no pueden balancearse perfectamente. En un proyecto más grande, los problemas pueden ser mayores y las decisiones puede que consistan en retardar ciertas actividades más allá de las iniciaciones tardías debido en restricciones de mano de obra, sin embargo PERT/CPM mantendrá alerta al director por anticipado sobre estos problemas y proporcionará tiempo para acciones correctivas.
Debe notarse que el método heurístico aplicado aquí como los otros métodos, no garantiza una solución óptima y no operará siempre tan fácil y claramente como sucedió aquí. Para discusiones sobre otros métodos,
En algunas situaciones puede resultar económico finalizar un proyecto antes de lo planeado. Esto puede significar que se tenga que contratar personal adicional, que se debe trabajar tiempo extra, o comprar más equipo para ayudar a los trabajadores a terminar más temprano. En proceso de reducir el tiempo de terminación del proyecto por estos medios se le denomina colisión. Un proyecto con tiempos de actividad normal y costos de colisión. El diagrama de la red del proyecto.
El primer paso es calcular el tiempo de terminación del proyecto, ruta crítica y costos tanto en condiciones normales como en condiciones de colisión.
La ruta crítica para los tiempos colisionados no necesita ser la misma de la de los tiempos normales. (Si por ejemplo, una actividad no crítica puede colisionarse en exceso a su holgura total, se convertiría en una actividad crítica.
Hemos identificado entonces el programa tiempo normal-costo normal del de menor costo - mayor costo del proyecto. ¿Qué tal si el director del programa deseara saber cual sería el programa de menor costo para finalizar el programa en 30 semanas, 35 o cualquier otro período entre 44 y 28 semanas? Para reducir el tiempo del proyecto debemos reducir obviamente el tiempo necesario para completar la ruta crítica. También debemos hacer ésto al menor costo posible. Por tanto, debemos elegir la actividad en la ruta crítica que tenga el menor costo de colisión. En nuestro ejemplo, las actividades A y B cuestan ambas $100 por semana para colisionarlas. En caso de empate debemos elegir la actividad que pueda reducir la duración del proyecto en gran cantidad, la cual es A.
Ahora colisionamos completamente A de 14 semanas a 6 semanas. Esto agrega $800 al costo del proyecto ( 8 semanas x $100/semana ), dando un total de $7.200. Debemos revisar la red para reflejar la colisión de la actividad A. La Colisión de la actividad A ha reducido la ruta crítica previa. A-E-G a 36 semanas. Pero también se debe notar que la colisión hace ahora también crítica la ruta B-C-F-G (= 36 semanas). Este es un ejemplo de actividades no críticas que se convierten en críticas cuando se colisionan.
Teniendo en cuenta que la actividad G es la única actividad que puede reducir el tiempo del proyecto, la elegimos como la siguiente para colisionar. Reducimos Te (G) de 12 a 8 semanas a un costo de $400. La red es ahora la que se muestra, siendo el costo total del proyecto de $7.600 con una duración de 32 semanas.
Con las dos rutas críticas A-E-G y B-C-F-G ambas iguales a 32 semanas, debemos elegir ahora una actividad que para cada una de las ramas que reduzca la duración del proyecto. Puesto que F el costo más bajo de las que quedan, se elegirá esta. La actividad E es la única que queda en la otra ruta. Aunque E puede colisionarse a 4 semanas, no vale la pena colisionar más de 2 semanas, pues este es el límite de la actividad F. Esta colisión se traduce en elevar el costo del proyecto en $600 (2x100 para la actividad F más 2 X 200 para la actividad E. El costo total del proyecto es así $8.200, con una duración de 30 semanas. La red resultante se muestra en la figura final.
Como probablemente se puede ver ahora, El paso final es colisionar la actividad E y alguna de la B ó C. Este paso cuesta $800, haciendo que el costo total del proyecto colisione a $9.000, que es menor que la colisión de todas las actividades, como se mostró antes.
Note que la colisión de cualquiera de las actividades B o D no se traduce en una reducción del tiempo del proyecto. El resultado de éste análisis se puede graficar para mostrar el costo de colisión para cualquier tiempo de terminación del proyecto entre un programa con colisión normal y otro con colisión completa.
No hay comentarios:
Publicar un comentario